Research Frontiers研究前沿
Pioneering the future of Perception, Industry, and Embodied AI.引領 Perception、Industry 與 Embodied AI 的未來。
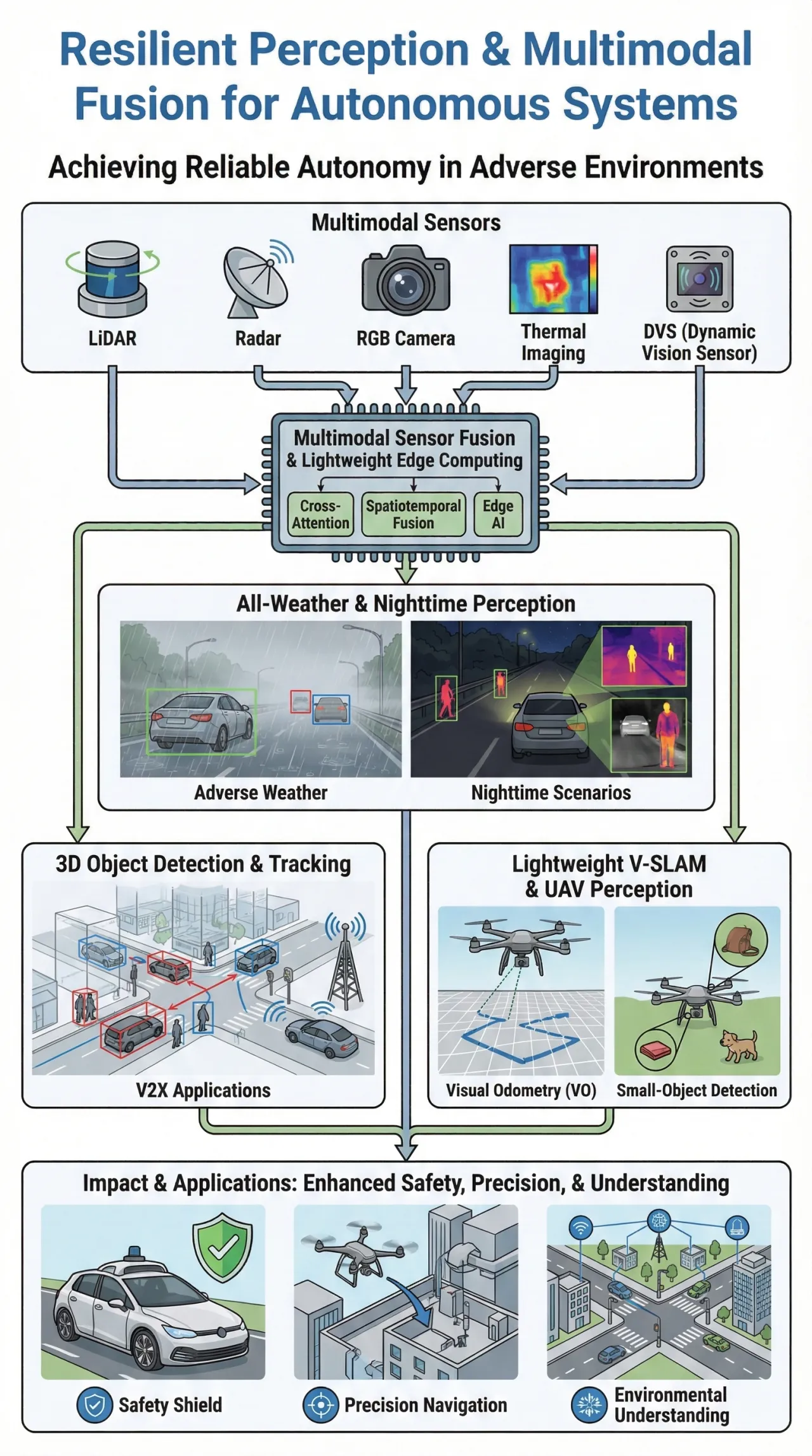
Resilient Perception & Multimodal Fusion面向自主系統的韌性感知與多模態融合
Achieving reliable autonomy in complex, dynamic, and unstructured environments. We develop robust perception architectures that function effectively under adverse weather opacity and low-light scenarios. Our strategy relies on multimodal sensor fusion (LiDAR, Radar, Camera, Thermal, DVS) to enhance safety and navigation precision for autonomous vehicles and UAVs.在複雜、動態且非結構化的環境中實現可靠自主性。我們開發在惡劣天候遮蔽與低光環境下仍能有效運作的韌性感知架構,並透過多模態感測器融合(LiDAR、Radar、Camera、Thermal、DVS)提升自動駕駛車輛與 UAV 的安全性與導航精度。
Multimodal Sensor Fusion多模態感測器融合
Cross-Attention and Spatiotemporal architectures combining Camera, LiDAR, Radar, and Thermal data.結合 Camera、LiDAR、Radar 與 Thermal 資料的 Cross-Attention 與時空架構。
All-Weather Perception全天候感知
Robust object detection algorithms designed specifically for rain, fog, and nighttime scenarios.專為雨天、霧天與夜間場景設計的魯棒物件偵測演算法。
2D/3D Object Detection2D/3D 物件偵測
High-precision 3D localization and tracking systems applied to autonomous driving and V2X.應用於自動駕駛與 V2X 的高精度 3D 定位與追蹤系統。
UAV PerceptionUAV 感知
Efficient Visual Odometry (VO) and small-object detection optimized for drones.為無人機優化的高效 Visual Odometry (VO) 與小目標偵測。
Key Technologies關鍵技術
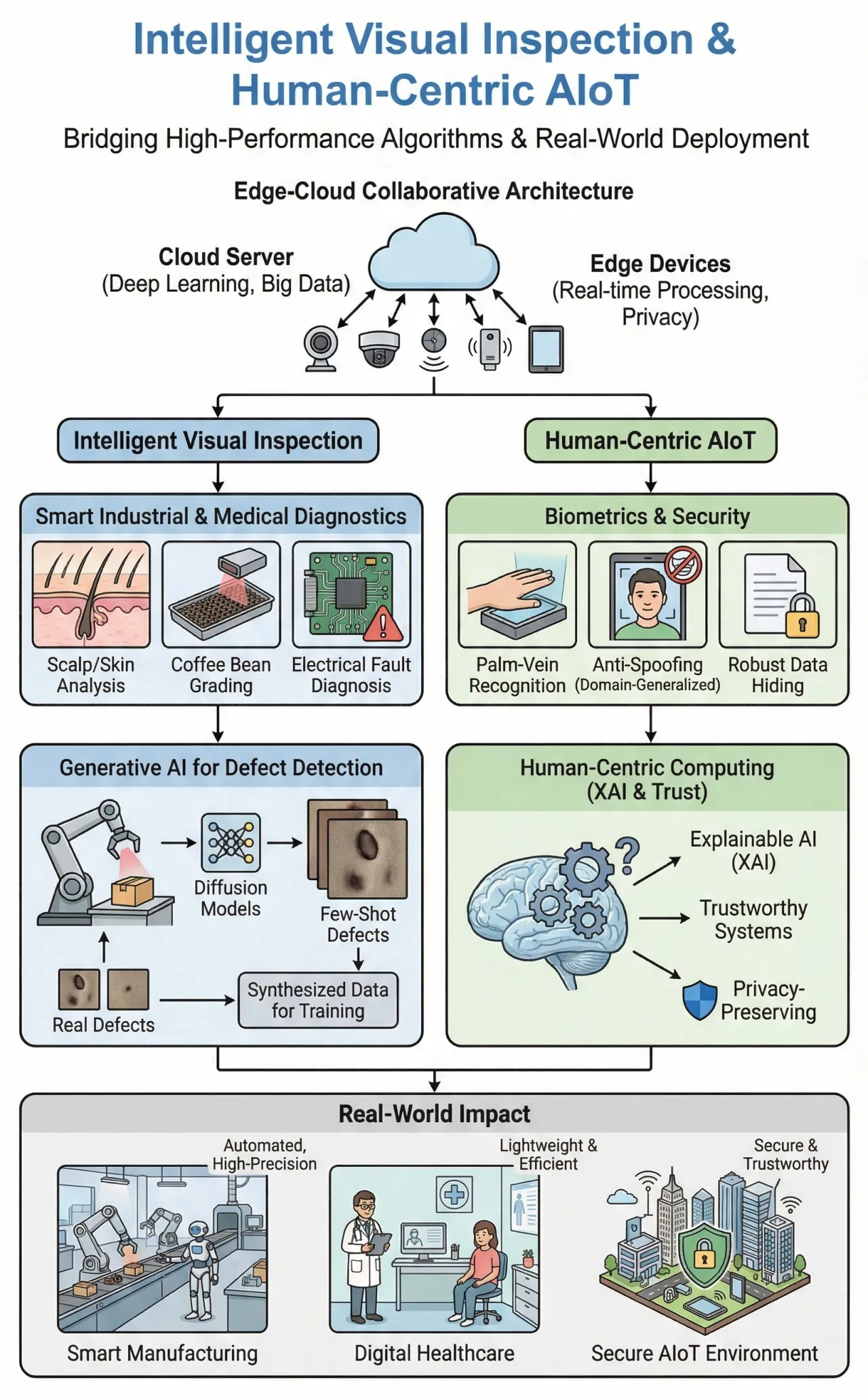
Intelligent Visual Inspection & AIoT智慧視覺檢測與以人為本的 AIoT
Bridging high-performance algorithms with real-world deployment. We specialize in Industrial Inspection and Healthcare Diagnostics, utilizing lightweight deep learning and domain adaptation to solve data scarcity. Our work in Human-Centric Computing prioritizes trust, privacy, and explainable AI (XAI).將高效能演算法與真實場域部署相連結。我們專注於工業檢測與醫療診斷,運用輕量化 Deep Learning 與領域適應解決資料稀缺問題;以人為本的計算研究則以信任、隱私與可解釋 AI(XAI)為優先考量。
Smart Diagnostics智慧診斷
Automated inspection for medical imaging (X-ray, dermatology) and industrial manufacturing.針對醫學影像(X-ray、皮膚科)與工業製造的自動化檢測。
Edge-Cloud Collaboration邊緣雲端協同
Distributed frameworks optimizing real-time processing and privacy across edge devices.跨邊緣裝置優化即時處理與隱私保護的分散式框架。
Biometrics & Security生物辨識與資安
Advanced palm-vein recognition, face anti-spoofing, and robust data hiding techniques.進階掌靜脈辨識、人臉防偽,以及穩健的資料隱藏技術。
Generative Defect AI生成式缺陷 AI
Using Diffusion Models to synthesize defect samples for few-shot learning in manufacturing.利用 Diffusion Models 合成缺陷樣本,用於製造業的 Few-Shot Learning。
Key Technologies關鍵技術
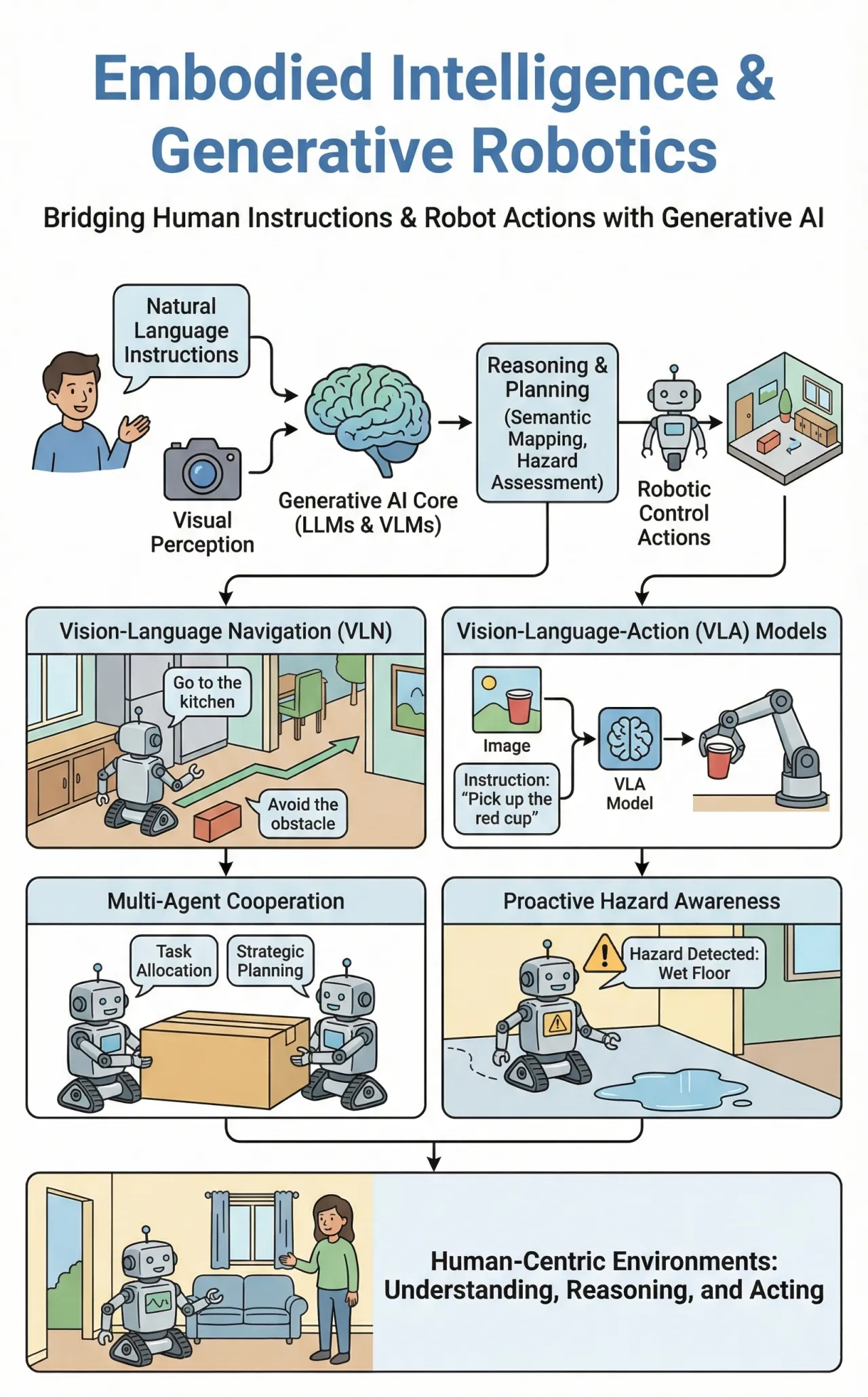
Embodied Intelligence & Generative Robotics具身智慧與生成式機器人
Closing the semantic gap between human instructions and robot actions. By integrating LLMs and VLMs with robotic control, we empower agents to perform natural language navigation, hazard assessment, and multi-agent cooperation in human-centric environments.縮小人類指令與機器人行動之間的語意落差。透過將 LLMs 與 VLMs 整合至機器人控制,我們賦予代理人自然語言導航、危險評估以及在以人為本環境中多代理協作的能力。
Vision-Language Nav視覺語言導航
Semantic mapping and path planning based on natural language instructions (VLN).基於自然語言指令的語意地圖建構與路徑規劃(VLN)。
VLA Models視覺語言動作模型
End-to-end Vision-Language-Action models mapping inputs directly to robotic control.端到端 Vision-Language-Action 模型,將輸入直接映射為機器人控制指令。
Multi-Agent Systems多代理系統
Using LLMs to orchestrate communication and strategy among multiple robotic agents.運用 LLMs 協調多個機器人代理間的通訊與策略。
Proactive Safety主動安全
Language-driven reasoning for identifying environmental risks and safe navigation.以語言驅動的推理識別環境風險並實現安全導航。